Por favor, use este identificador para citar o enlazar este ítem:
https://hdl.handle.net/11000/34278Registro completo de metadatos
| Campo DC | Valor | Lengua/Idioma |
|---|---|---|
| dc.contributor.author | Marin López , María José | - |
| dc.contributor.author | Reinoso, Oscar | - |
| dc.contributor.author | Ubeda González, David | - |
| dc.contributor.author | Jiménez García, Luis Miguel | - |
| dc.contributor.author | Gil Aparicio, Arturo | - |
| dc.contributor.author | Paya, Luis | - |
| dc.contributor.author | Ballesta, Mónica | - |
| dc.contributor.author | Peidro Vidal, Adrián | - |
| dc.contributor.other | Departamentos de la UMH::Ingeniería de Sistemas y Automática | es_ES |
| dc.date.accessioned | 2025-01-10T16:49:51Z | - |
| dc.date.available | 2025-01-10T16:49:51Z | - |
| dc.date.created | 2019-02 | - |
| dc.identifier.citation | Oficina española de patentes y marcas | es_ES |
| dc.identifier.uri | https://hdl.handle.net/11000/34278 | - |
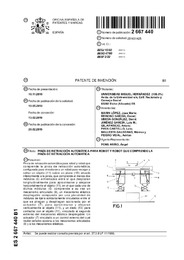
| dc.description.abstract | La presente invención se encuadra en el campo técnico de las cabezas de aprehensión, más concretamente en el de aquellas con posibilidad para el levantamiento o el cambio a distancia de la cabeza o de partes de ésta, así como en el de las que tienen elementos en forma de dedos, y se refiere en particular a un dispositivo tipo pinza acoplable en robots que presenta un único grado de libertad y permite una aproximación vertical precisa a un elemento que se pretende aprehender o liberar, así como a un robot que incorpora la pinza así descrita. | es_ES |
| dc.format | application/pdf | es_ES |
| dc.format.extent | 18 | es_ES |
| dc.language.iso | spa | es_ES |
| dc.publisher | Oficina española de patentes y marcas | es_ES |
| dc.rights | info:eu-repo/semantics/openAccess | es_ES |
| dc.rights | Attribution-NonCommercial-NoDerivatives 4.0 Internacional | * |
| dc.rights.uri | http://creativecommons.org/licenses/by-nc-nd/4.0/ | * |
| dc.subject.other | CDU::6 - Ciencias aplicadas::62 - Ingeniería. Tecnología | es_ES |
| dc.title | Pinza de retracción automática para robot y robot que comprende la pinza de retracción automática | es_ES |
| dc.type | info:eu-repo/semantics/patent | es_ES |
Ver/Abrir:
ES2667440B1.pdf
1,03 MB
Adobe PDF
Compartir:
 La licencia se describe como: Atribución-NonComercial-NoDerivada 4.0 Internacional.
La licencia se describe como: Atribución-NonComercial-NoDerivada 4.0 Internacional.